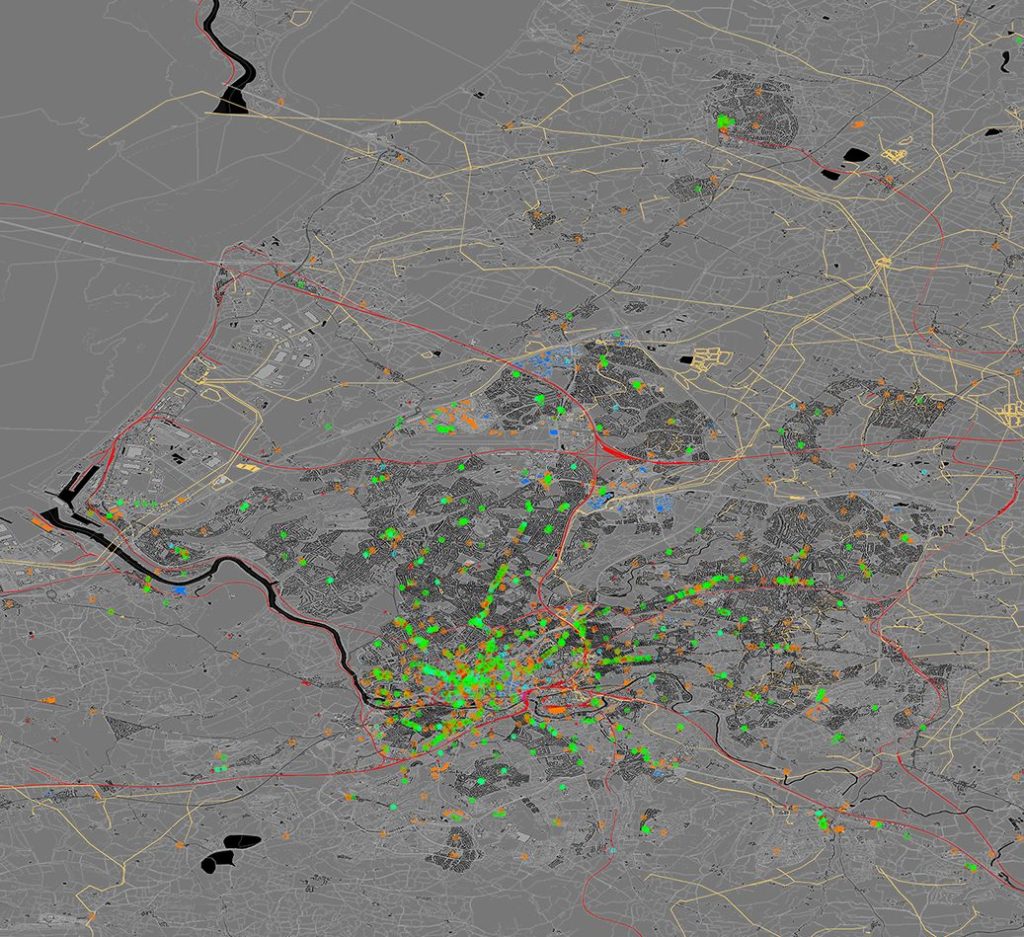
Big city simulations require big data capabilities
We can unpack OSM of the UK to 1m² scale in under 2 minutes.
Unpack the whole of EU OSM in under 2 hours.
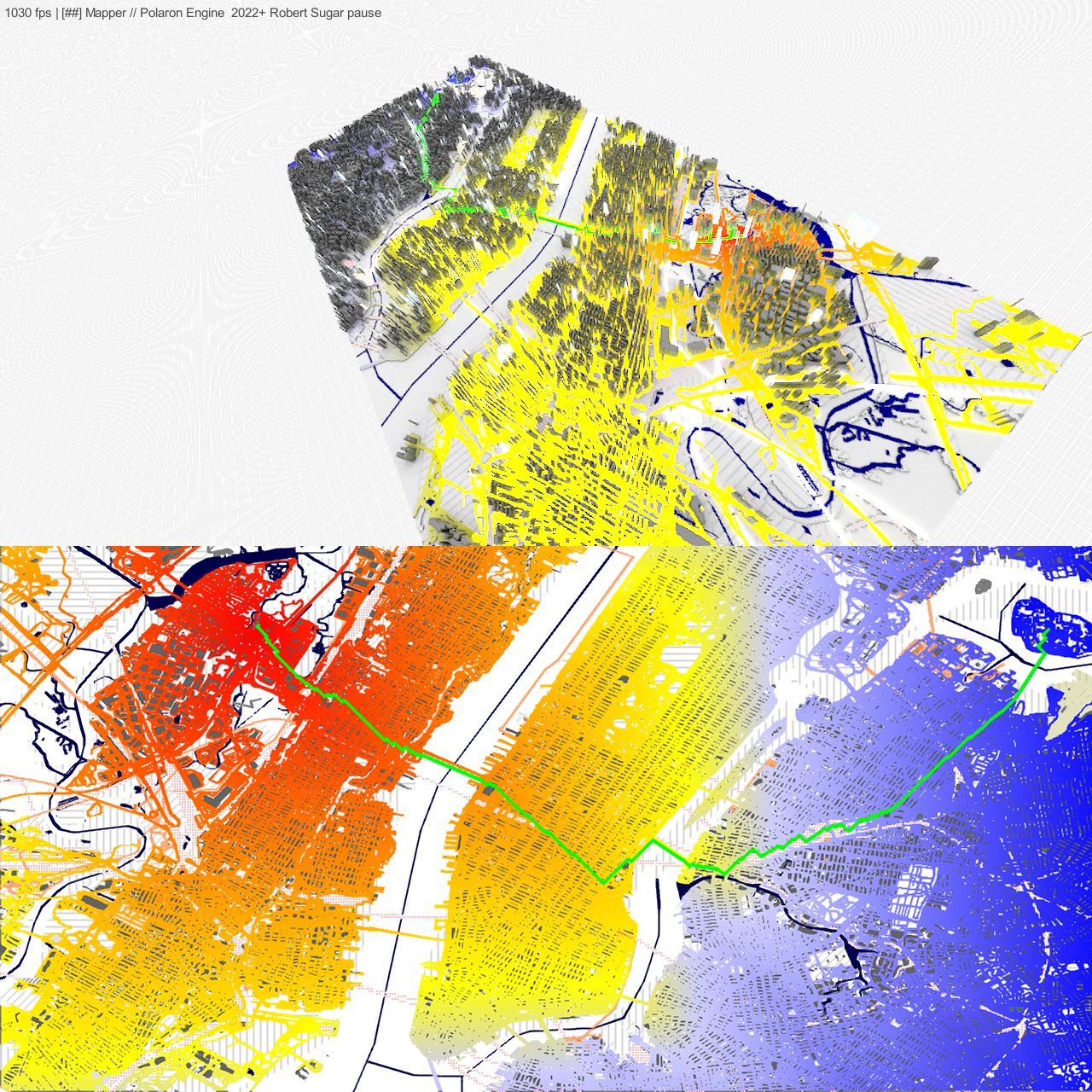
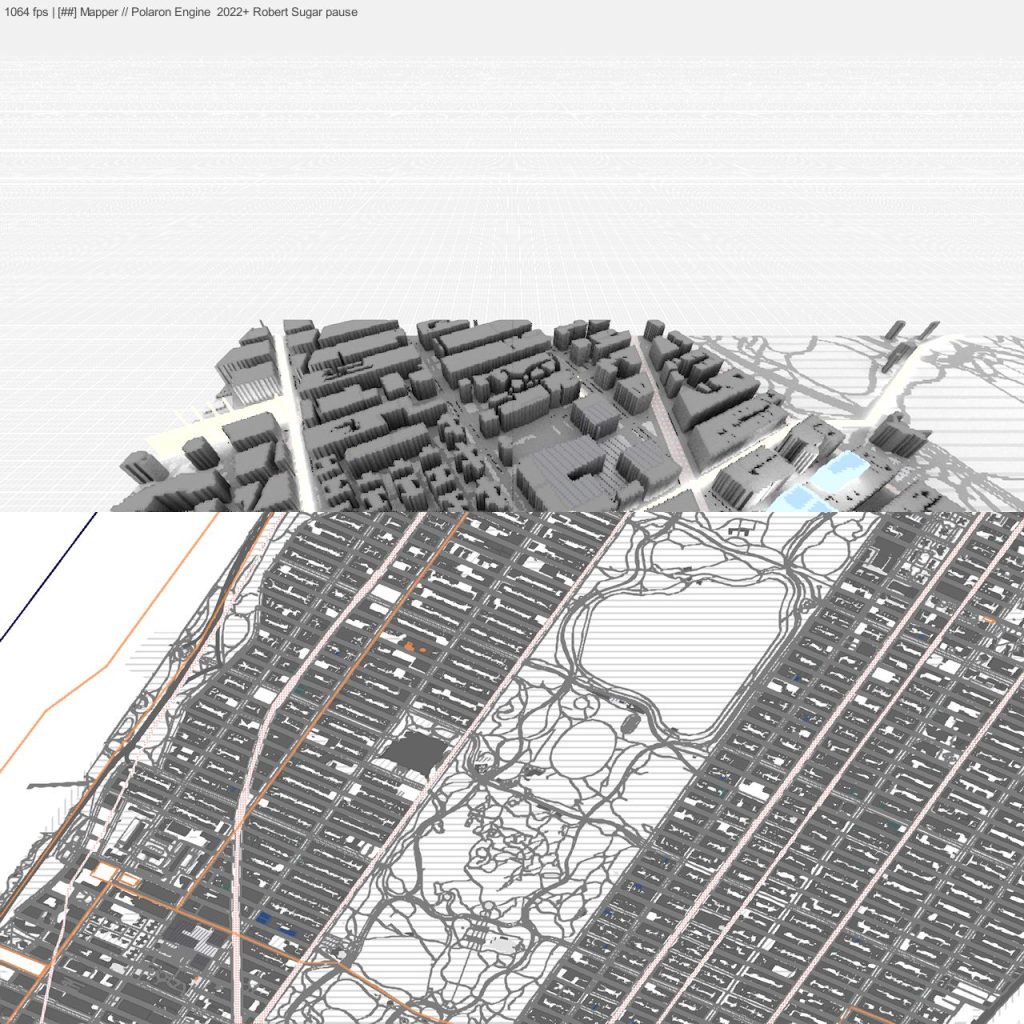
This gives us the ability to pack a lot of detail into our models.
Once the attractiveness of the veneer of realistic looking (but often a simple mesh sits beneath the texture) has worn off – you can use the incredible density of Polaron to simulate many different city scale functions and impacts.
Processing this data isn’t easy – it includes data cleansing and error correction as such large DBs can’t be conventionally parsed which means cleaning up and processing data to make it usable in real-time.
So for instance at a city scale of data we will typically update the OSM base layer and perform a change analysis against that and other sources – combined with changing data and updates from live sensors.
As fast as we can read from an SSD
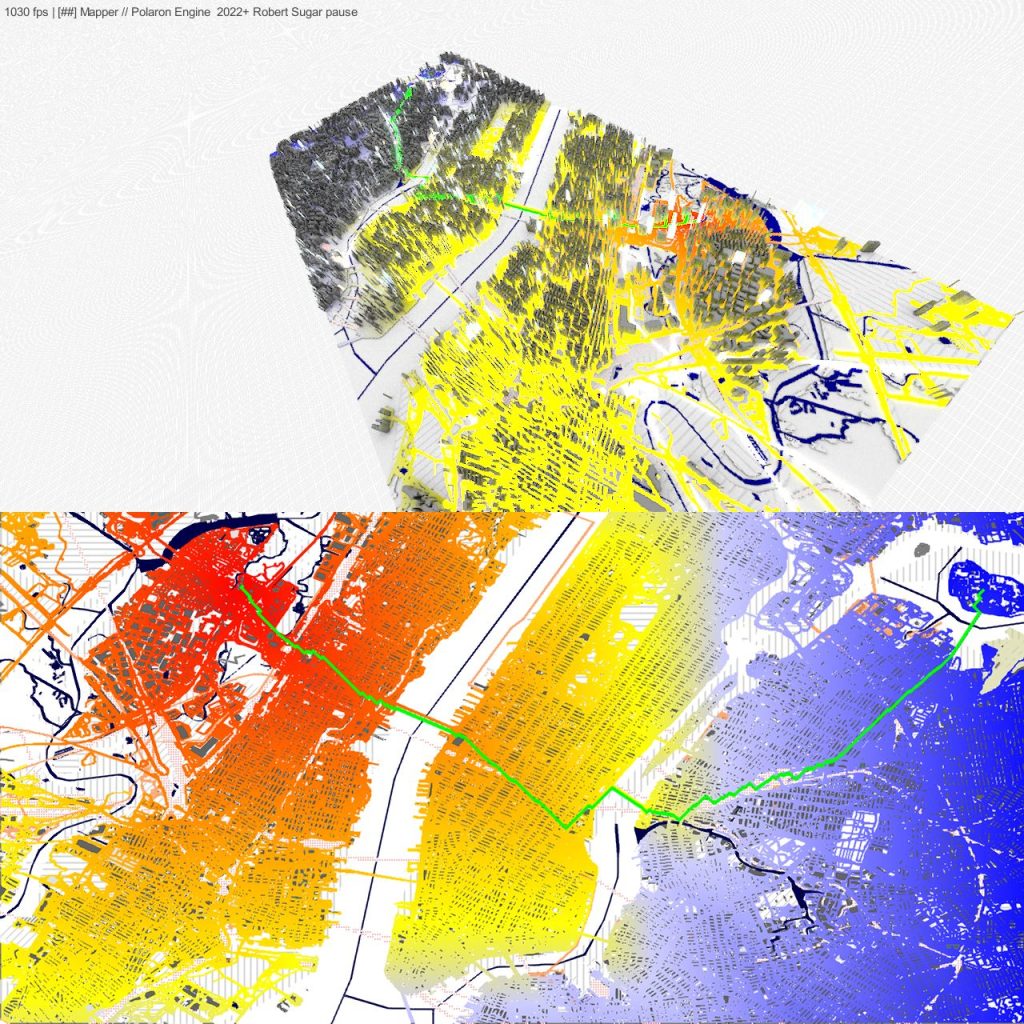
This speed allows us to run and maintain a real-time raster of the terrain. Typically, we then sub-divide this into 50km² tiles and can cache these – as well as the simulations, additional data layers.
This means we can keep your data up to date and model hundreds of km² – running both simulation in your frustrum (*ie the area you’re looking at on your screen – as well as the wider AOI – Area of Interest).
- Update models and predictions as fast as the sensors can render them. Allowing you to quickly respond to events and new data.
- Scrub through time – to see how events occur and develop or where risks are growing. Move beyond the snapshot – and simulate real environments over time.
- Get updates in real-time – against changes or proposed changes. Modelling, planning, and simulation become truly effective when near-instant feedback can be achieved. Wait less and think more.
- Explain machine insights and tailor them with human factors to augment human decision making. Simulation and even AI insight has to be mapped and applied – allowing greater transparency in the data and validated against real sensor input.
Keep it fast & keep it real-time
Like any program – there are finite resources available to it, which is why we offer a range of options for hosting and operation.
There are pros and cons to different models – we can work with you to find out which one (or which combination of options) is best for you. Whether running independently, or on shared or private cloud tenants, private hosted rack spaces or on-prem or even installed or virtualized environments. We have a range of options that will suit your needs – ultimately not all simulations need to be real-time – but we think this allows decisions at the speed of thought.
GIS, EOS & LEO input into Polaron
We have relationships with a number of GIS, EOS, and LEO providers – allowing you to access both raw data – in a range of spectrums as well as increasingly to ingest the analytical insights some of these platforms offer. By augmenting OSM data and layers with other datasets – we can provide a rich and semantically relevant base map.
- Formats and standards supported (we’re growing so we will always entertain new formats)
- EOS Data & APIs
- GIS data and interoperability
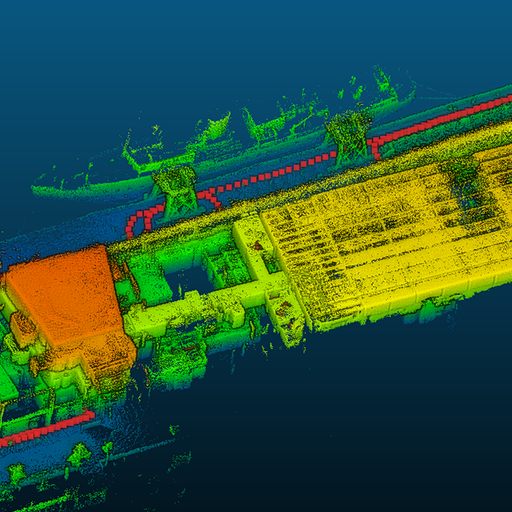
Robots, UAVs, UGVs, and SLAM
Robotics offer a huge time saving over manual scanning. Additionally hand-held SLAM devices are emerging (we’re working with the state-of-the-art) that allows you to point and scan – and get high-accuracy maps out with very little effort or expertise. Automation from fixed and mobile sensors is part of Urban Hawk’s roadmap.